Objectif de la carte de conversion
Dans le domaine de l’instrumentation et de la régulation industrielle, la boucle de courant 4-20mA est le standard incontournable pour la transmission des signaux de mesure (pression, température, niveau, etc.). Son principal avantage réside dans sa grande immunité aux parasites électromagnétiques et l’absence de chute de tension sur les grandes longueurs de câbles.
Cependant, de nombreux automates programmables industriels (API), tels que les gammes Siemens S7-1200 ou S7-1500, ainsi que les cartes d’acquisition standard (Arduino, Raspberry Pi avec ADC) sont souvent équipés d’entrées analogiques fonctionnant en tension, typiquement de 0 à 10V. L’objectif de ce montage est donc de réaliser une interface matérielle d’adaptation fiable et précise, permettant de convertir ce signal de courant industriel en une tension exploitable par le contrôleur.
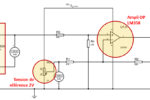
Schéma du montage sous Proteus

Vidéo de la simulation
Pour mieux comprendre le comportement du circuit en temps réel, voici la vidéo de la simulation complète réalisée sous Proteus ISIS :
Principe de fonctionnement et Équations
Le circuit est architecturé autour d’un amplificateur opérationnel (AOP) LM358, configuré en amplificateur différentiel (ou montage soustracteur). Le processus de conversion se décompose en deux grandes étapes physiques :
1. La conversion Courant-Tension (L’étage d’entrée)
Le signal de la boucle 4-20mA traverse en premier lieu la résistance de précision (Shunt) R500 (500 Ω). Conformément à la loi d’Ohm, le passage de ce courant génère une tension Vin à ses bornes :
- Pour le minimum de l’échelle (4 mA) :
Vin = 500 Ω × 0.004 A = 2 V - Pour le maximum de l’échelle (20 mA) :
Vin = 500 Ω × 0.020 A = 10 V
À l’issue de cette première étape, le signal de courant 4-20mA est transformé en une plage de tension de 2V à 10V. L’excursion (la plage de variation utile) est donc de 8 Volts (10V – 2V).
2. La soustraction de l’offset et l’amplification
Pour atteindre notre plage cible finale de 0 à 10V, le circuit doit opérer deux corrections mathématiques simultanées :
- Soustraire le décalage (offset) : Retirer les 2V initiaux pour que les 4mA correspondent exactement à 0V.
- Amplifier le signal : Étirer l’excursion de 8V pour qu’elle atteigne 10V.
L’équation caractéristique d’un amplificateur différentiel (avec R3 = R1 et R4 = R2) démontre exactement ce comportement :
Dans cette formule fondamentale :
Vrefest la tension de référence (2V) qui sera soustraite du signal d’entrée.- Le ratio
R2 / R1représente le gain global d’amplification de notre montage.
Justification des composants et dimensionnement
Le Choix de l’AOP : Le LM358
💡 Pourquoi utiliser un LM358 plutôt qu’un TL071 ou un 741 ?
Le LM358 a été spécifiquement choisi car c’est un amplificateur « Single Supply » (alimentation simple). Il peut être alimenté entre 0V et 12V (ou 24V), contrairement à d’autres AOP qui nécessitent une alimentation symétrique (+12V/-12V). De plus, sa plage de tension d’entrée de mode commun inclut la masse (0V), ce qui est indispensable ici puisque notre signal de sortie doit pouvoir descendre jusqu’à 0V.
Le Potentiomètre RV1 (2 kΩ) : Le réglage du Zéro (Offset)
Le potentiomètre RV1 est monté en pont diviseur de tension entre l’alimentation (12V) et la masse. Son rôle est de générer la tension Vref = 2V précise.
Avec une alimentation de 12V et un potentiomètre de 2 kΩ, le courant traversant le potentiomètre est de 6mA, ce qui garantit une bonne stabilité de la référence. Pour obtenir 2V, le curseur doit être réglé à :
Position (%) = (2V / 12V) × 100 ≈ 16.6% (arrondi à 17% dans la simulation).
Les résistances R1, R3 (47 kΩ) et R2, R4 (62 kΩ) : Le réglage du Gain
Comme vu précédemment, notre excursion d’entrée est de 8V (de 2V à 10V) et nous souhaitons une sortie de 10V. Le gain théorique absolu doit donc être :
Gain théorique = 10V / 8V = 1.25
Si l’on fixe R1 (et R3) à une valeur normalisée de 47 kΩ, la valeur idéale pour R2 serait de :
R2 = 47 kΩ × 1.25 = 58.75 kΩ.
Puisque 58.75 kΩ n’est pas une valeur standard courante en électronique, les concepteurs choisissent généralement la valeur E24 immédiatement supérieure : 62 kΩ.
L’importance de la marge (Span) : Un gain légèrement supérieur (1.32 au lieu de 1.25) est volontaire en milieu industriel. Il permet de compenser les imprécisions des composants. En pratique, la résistance d’entrée R500 (généralement constituée d’une résistance fixe de 470Ω en série avec un petit potentiomètre d’ajustement) sera très légèrement baissée lors de la calibration pour que la sortie soit parfaitement de 10.0V à 20mA.
Procédure de Calibration (Étalonnage)
Pour garantir la précision de votre carte une fois soudée, une phase de calibration est indispensable. Voici la marche à suivre à l’aide d’un générateur de boucle 4-20mA et d’un multimètre précis :
- Réglage du Zéro (Offset) : Injectez un courant de 4.00 mA exactement à l’entrée. Mesurez la tension de sortie (Vout) et ajustez le potentiomètre RV1 jusqu’à obtenir exactement 0.00 V.
- Réglage de la Pleine Échelle (Span) : Injectez un courant de 20.00 mA à l’entrée. Ajustez l’impédance d’entrée (RV2 dans le schéma de simulation) pour obtenir exactement 10.00 V en sortie.
- Vérification : Répétez les étapes 1 et 2, car le réglage du Span peut très légèrement influencer le Zéro. Injectez ensuite 12 mA (50% de l’échelle) ; vous devriez lire idéalement 5.00 V.
Conclusion
Ce convertisseur basé sur un LM358 est un classique de l’électronique analogique. Simple à réaliser, très économique et robuste, il démontre parfaitement l’utilité des amplificateurs différentiels. En utilisant des résistances de précision (tolérance de 1% ou mieux), il permet de conditionner des signaux industriels de manière extrêmement fiable pour l’acquisition de données sur automate.