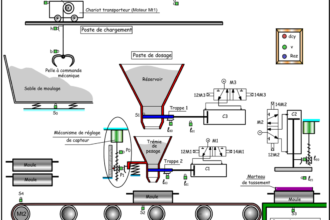
Un tapis avance pas à pas et transporte des bidons vides qui seront remplis et ensuite bouchés à des postes de travail différents (voir figure ci-dessous).
L’approvisionnement en bidons n’est pas régulier et certains bidons peuvent manquer de temps à autre.
La distance entre les bidons présents est fixée par des taquets situés sur le tapis et distants d’un pas.
Un dispositif permet à chacun des deux postes décrits, de détecter la présence ou l’absence d’un bidon.
Capteurs :
- Ci : Conditions initiales
- Oa : Ordre d’avance du tapis
- bp : bidon présente
- ba : bidon absent
- fa : fin d’avance du tapis
- fr : fin de remplissage
- fb : fin de bouchage
Actionneurs :
- AP : Avance d’un pas
- B : Bouchage
- R : Remplissage
Question : Etablir le Grafcet de point de vue partie opérative (niveau 2) de cet automatisme.