Description du système :
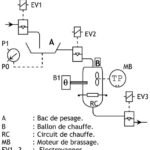
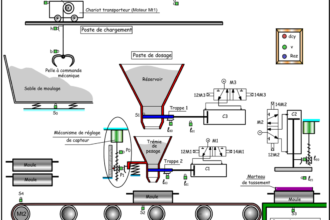
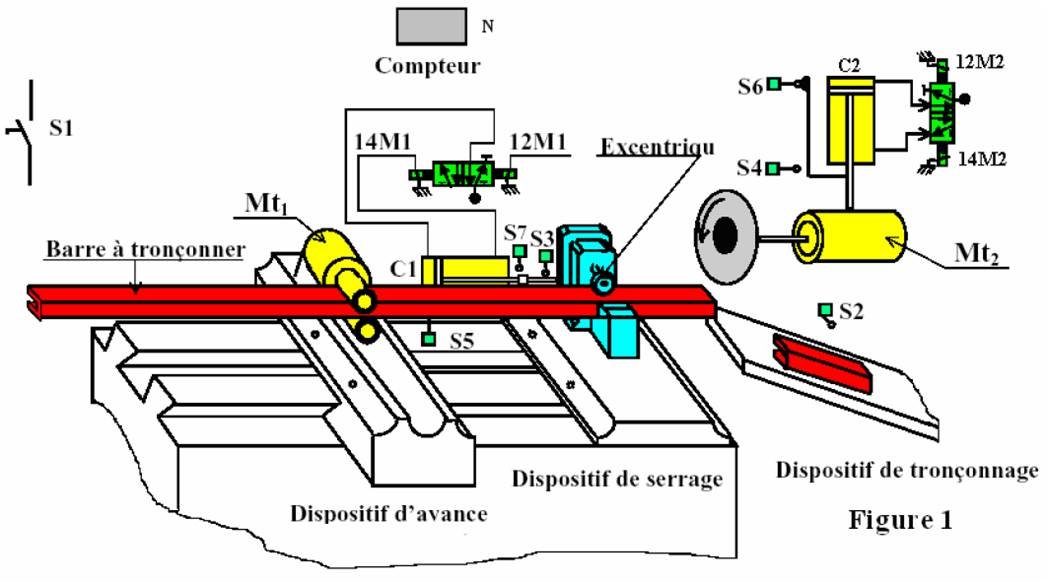
La figure ci-dessous représente un système de tronçonnage utilisé pour le découpage des barres d’aluminium en forme de profilé : U
Le système permet le découpage d’une barre en 20 morceaux de longueur prédéterminée.
Le fonctionnement est le suivant :
- La barre est introduite manuellement entre les deux rouleaux, sa présence est détectée par le capteur S5
- L’action sur le bouton poussoir S1, met le moteur Mt1, en marche. Le dispositif d’avance la barre
- Lorsque celle-ci actionne le capteur S2. Le moteur Mt1, s’arrête et le vérin pneumatique C1 provoque le serrage de la barre grâce à un dispositif approprié
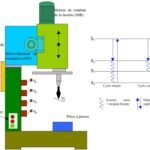
- Une fois la barre est serrée (capteur S3 actionné), le moteur Mt2, fonctionne et le vérin pneumatique C2, fait descendre le dispositif de tronçonnage
- La fin du tronçonnage est détectée par le capteur S4 provoquant ainsi l’arrêt du moteur Mt2, et la rentrée de la tige du vérin C2 (détectée par le capteur S6)
- Lorsque le capteur S6 est actionné, la barre est desserrée (rentrée de la tige du vérin C1)
- Lorsque celle-ci actionne le capteur S7. Le compteur N est incrémenté de 1
- Le comptage des morceaux découpés se fait par un compteur N modulo 32
Le cycle décrit précédemment se répète tant que le nombre de morceaux découpés reste inférieur à 20 dans le cas contraire, on provoque l’arrêt du système et l’initialisation du compteur.
Pour des raisons de sécurités, la barre ne peut avancer que si le moteur Mt2 est en position haute.
Les moteurs Mt1 et Mt2 sont respectivement alimentés par des contacteurs KM1 et KM2.
Questions :
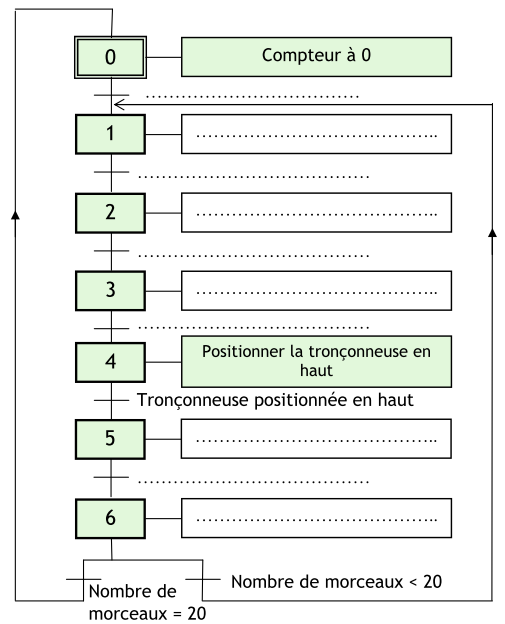
- Etablir le Grafcet de point de vue partie système (niveau 1)
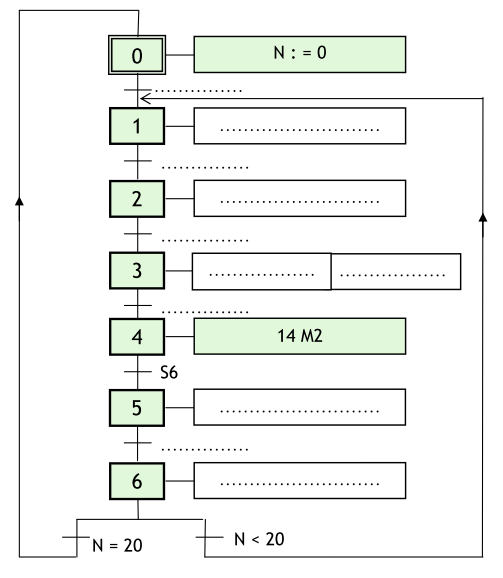
- Etablir le Grafcet de point de vue partie opérative (niveau 2)
- Donner la table d’affectation des adresses de l’API
- et 2)